Software Design
There are three major software components for this project. These are the height controller, firmware, and user interface.
Height Control
Using a Microsoft Kinect, the height of each actuator can be measured using laser scans. This method of height measurement is is non-intrusive and requires no modification to the actuators.
Firmware
Using a Arduino Uno microcontroller, the firmware will take height measurement information from the Kinect, and will output the appropriate control signals to achieve the target height objectives for each actuator. In order to control the large number of individual actuators, a set of de-multiplexers and switching relays will be used.
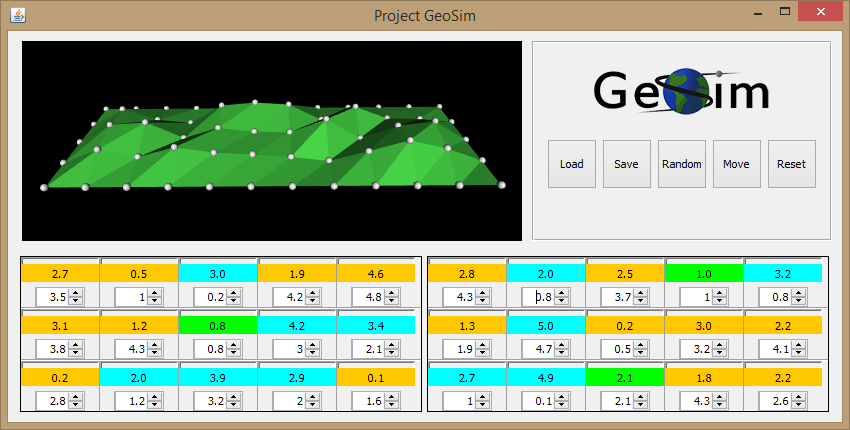
User Interface
The system is intended to be connected to a PC or laptop. With the help of an interactive software, user can input a terrain data to be simulated on the system, or actuate each point manually in real time.